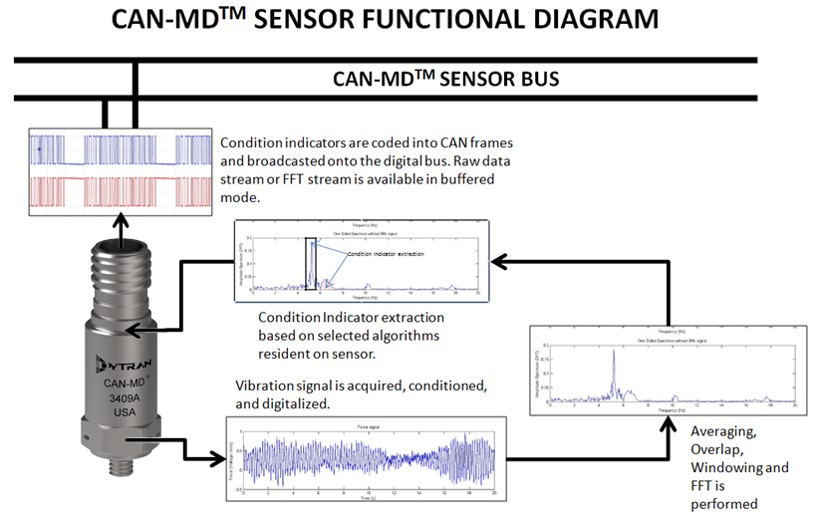
A Condition Indicator (CI) is the result, or the processed data, that is provided as an output on the CAN bus. This is the most significant part of the CAN-MD system. No longer is a complicated HUMS or VHM system central processing unit needed to process the raw data from the accelerometers. The sensors themselves process the data. In order to perform their duties, the sensors need to know some setup information. They need to know when to take data. Do they take it all the time or do they respond to a command? Do they report raw data / intermediate data or just results? The answer is yes to it all. The CAN-MD sensors can boot up and start collecting and processing CIs automatically. These CIs can later be filtered with operatonal regime information to classify regime dependent results. The CAN-MD sensors can respond to commands over the CAN bus. These commands can be an order to collect and output raw data on the CAN bus, (something most systems can’t do without a temporary development build requiring additional NRE cost and special flight test software).
Additionally, a critical design aspect is that each sensor has its own address and the setup configuration is stored at the sensor level rather than on a central processor. It will then be infinitely easier to identify which sensor a particular CI is assigned to during firmware testing and fielding of the product.
And finally, the end result of the CI can be automatically and continuously calculated or can be commanded via the CAN interface. This allows other devices on the network to issue a command, or the end user can connect a portable data reader and command the system to perform a special test.
The library of CIs for the CAN-MD system covers both synchronous and non-synchronous methods. The term synchronous and nonsynchronous refer to whether the vibration data is measured and processed with the trigger signal of a tachometer. The nonsynchronous methods include spectra and peak within a band as well as a few others. The synchronous methods include synch time averages, order domain peaks (amplitude and phase) and most standard gear and bearing features.